 W
WArgo is an international program that uses profiling floats to observe temperature, salinity, currents, and, recently, bio-optical properties in the Earth's oceans; it has been operational since the early 2000s. The real-time data it provides is used in climate and oceanographic research. A special research interest is to quantify the ocean heat content (OHC).
 W
WArgo is an unmanned deep-towed undersea video camera sled developed by Dr. Robert Ballard through Woods Hole Oceanographic Institute's Deep Submergence Laboratory. Argo is most famous for its role in the discovery of the wreck of the RMS Titanic in 1985. Argo would also play the key role in Ballard's discovery of the wreck of the battleship Bismarck in 1989.
 W
WThe bathythermograph, or BT, also known as the Mechanical Bathythermograph, or MBT; is a small torpedo-shaped device that holds a temperature sensor and a transducer to detect changes in water temperature versus depth down to a depth of approximately 285 meters. Lowered by a small winch on the ship into the water, the BT records pressure and temperature changes on a coated glass slide as it is dropped nearly freely through the water. While the instrument is being dropped, the wire is paid out until it reaches a predetermined depth, then a brake is applied and the BT is drawn back to the surface. Because the pressure is a function of depth, temperature measurements can be correlated with the depth at which they are recorded.
 W
WBenthic landers are observational platforms that sit on the seabed or benthic zone to record physical, chemical or biological activity. The landers are autonomous and have deployment durations from a few days to several years.
 W
WThe RRS Charles Darwin was a Royal Research Ship belonging to the British Natural Environment Research Council. Since 2006, she has been the geophysical survey vessel, RV Ocean Researcher,
 W
WA CTD or Sonde is an oceanography instrument used to measure the conductivity, temperature, and pressure of seawater. The reason to measure conductivity is that it can be used to determine the salinity.
 W
WA current meter is oceanographic device for flow measurement by mechanical, tilt, acoustical or electrical means.
 W
WRRS Discovery is a Royal Research Ship operated by the Natural Environment Research Council. The ship is the third such vessel to be built and named for the ship used by Robert Falcon Scott in his 1901-1904 expedition to the Antarctic.
 W
WA drifter is an oceanographic device floating on the surface to investigate ocean currents and other parameters like temperature or salinity. Modern drifters are typically tracked by satellite, often GPS. They are sometimes called Lagrangian drifters since the location of the measurements they make moves with the flow. A major user of drifters is the Global Drifter Program.
 W
WEcho sounding is a type of sonar used to determine the depth of water by transmitting sound waves into water. The time interval between emission and return of a pulse is recorded, which is used to determine the depth of water along with the speed of sound in water at the time. This information is then typically used for navigation purposes or in order to obtain depths for charting purposes. Echo sounding can also refer to hydroacoustic "echo sounders" defined as active sound in water (sonar) used to study fish. Hydroacoustic assessments have traditionally employed mobile surveys from boats to evaluate fish biomass and spatial distributions. Conversely, fixed-location techniques use stationary transducers to monitor passing fish.
 W
WThe Ekman water bottle is a sea water temperature sample device. The cylinder is dropped at the desired depth, the trap door below is opened to let the water enter and then closed tightly. This can be repeated at different depths as each sample goes to a different chamber of the insulated bottle.
 W
WAn Epibenthic sled is an instrument designed to collect benthic and benthopelagic faunas from the deep sea. The sled is made from a steel frame consisting of two skids and stabilizing planes to keep it from sinking too deep into the mud. Attached to the frame is a 1 mm mesh net to collect the samples. The sled is towed along the seafloor at the sediment water interface. The device has a mechanically operated door that is closed when the sled is mid water and opens when it reaches the seafloor. When the fauna is collected, the door closes again to preserve the sample on the long trek back through the water column. The door prevents washing of the sample and loss of organisms through turbulence generated as the net is lifted out. The epibenthic sled can also be used with external sensors and cameras.
 W
WA float is an oceanographic instrument platform used for making subsurface measurements in the ocean without the need for a ship, propeller, or a person operating it. Floats measure the physical and chemical aspects of the ocean in detail, such as measuring the direction and speed of water or the temperature and salinity. A float will descend to a predetermined depth where it will be neutrally buoyant. Once a certain amount of time has passed, most floats will rise back to the surface by increasing its buoyancy so it can transmit the data it collected to a satellite. A float can collect data while it is neutrally buoyant or moving through the water column. Often, floats are treated as disposable, as the expense of recovering them from remote areas of the ocean is prohibitive; when the batteries fail, a float ceases to function, and drifts at depth until it runs aground or floods and sinks. In other cases, floats are deployed for a short time and recovered.
 W
WFort Denison, part of the Sydney Harbour National Park, is a protected national park that is a heritage-listed former penal site and defensive facility occupying a small island located north-east of the Royal Botanic Gardens and approximately 1 kilometre (0.62 mi) east of the Opera House in Sydney Harbour, New South Wales, Australia. The island was formerly known in its indigenous name of Mat-te-wan-ye, and as Pinchgut Island.
 W
WRRS James Clark Ross is a supply and research ship operated by the British Antarctic Survey.
 W
WThe RRS James Cook is a British Royal Research Ship operated by the Natural Environment Research Council (NERC). She was built in 2006 to replace the ageing RRS Charles Darwin with funds from Britain's NERC and the DTI's Large Scientific Facilities Fund. She was named after Captain James Cook, the British explorer, navigator and cartographer at the National Oceanography Centre, Southampton by The Princess Royal.
 W
WOcean acoustic tomography is a technique used to measure temperatures and currents over large regions of the ocean. On ocean basin scales, this technique is also known as acoustic thermometry. The technique relies on precisely measuring the time it takes sound signals to travel between two instruments, one an acoustic source and one a receiver, separated by ranges of 100–5000 km. If the locations of the instruments are known precisely, the measurement of time-of-flight can be used to infer the speed of sound, averaged over the acoustic path. Changes in the speed of sound are primarily caused by changes in the temperature of the ocean, hence the measurement of the travel times is equivalent to a measurement of temperature. A 1 °C change in temperature corresponds to about 4 m/s change in sound speed. An oceanographic experiment employing tomography typically uses several source-receiver pairs in a moored array that measures an area of ocean.
 W
WOceansat-2 is an Indian satellite designed to provide service continuity for operational users of the Ocean Colour Monitor (OCM) instrument on Oceansat-1. It will also enhance the potential of applications in other areas.
 W
WMS Polarfront was a Norwegian weather ship located in the North Atlantic Ocean. It was the last remaining weather ship in the world, maintained by the Norwegian Meteorological Institute.
 W
WThe Prediction and Research Moored Array in the Atlantic (PIRATA) is a system of moored observation buoys in the tropical Atlantic Ocean which collect meteorological and oceanographic data. The data collected by the PIRATA array helps scientists to better understand climatic events in the Tropical Atlantic and to improve weather forecasting and climate research worldwide. Climatic and oceanic events in the tropical Atlantic, such as the Tropical Atlantic SST Dipole affect rainfall and climate in both West Africa and Northeast Brazil. The northern tropical Atlantic is also a major formation area for hurricanes affecting the West Indies and the United States. Alongside the RAMA array in the Indian Ocean and the TAO/TRITON network in the Pacific Ocean, PIRATA forms part of the worldwide system of tropical ocean observing buoys.
 W
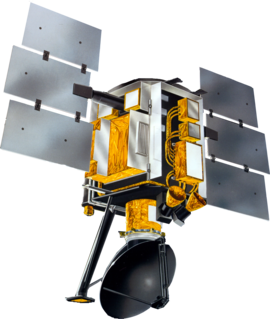
WThe NASA QuikSCAT was an Earth observation satellite carrying the SeaWinds scatterometer. Its primary mission was to measure the surface wind speed and direction over the ice-free global oceans. Observations from QuikSCAT had a wide array of applications, and contributed to climatological studies, weather forecasting, meteorology, oceanographic research, marine safety, commercial fishing, tracking large icebergs, and studies of land and sea ice, among others. This SeaWinds scatterometer is referred to as the QuikSCAT scatterometer to distinguish it from the nearly identical SeaWinds scatterometer flown on the ADEOS-2 satellite.
 W
WThe second USS Rehoboth (AVP-50/AGS-50) was in commission in the United States Navy as a seaplane tender from 1944 to 1947 and as an oceanographic survey ship from 1948 to 1970.
 W
WA research vessel is a ship or boat designed, modified, or equipped to carry out research at sea. Research vessels carry out a number of roles. Some of these roles can be combined into a single vessel but others require a dedicated vessel. Due to the demanding nature of the work, research vessels are often constructed around an icebreaker hull, allowing them to operate in polar waters.
 W
WRobert D. Conrad (T-AGOR-3) was a Robert D. Conrad-class oceanographic research ship that operated from 1962 to 1989. The ship, while Navy owned, was operated as the R/V Robert D. Conrad by the Lamont–Doherty Earth Observatory of Columbia University from delivery to inactivation. The ship provided valuable ocean-bottom, particularly seismic profile, information and underwater test data to the U.S. Navy and other U.S. agencies.
 W
WA rotor current meter (RCM) is a mechanical current meter, an oceanographic device deployed within an oceanographic mooring measuring the flow within the world oceans to learn more about ocean currents. Many RCMs have been replaced by instruments measuring the flow by hydroacoustics, the so-called Acoustic Doppler Current Profilers. However, for instance in Fram Strait, the Alfred Wegener Institute still uses RCMs for long-term monitoring the inflow into the Arctic Ocean.
 W
WThe Secchi disk, as created in 1865 by Angelo Secchi, is a plain white, circular disk 30 cm (12 in) in diameter used to measure water transparency or turbidity in bodies of water. The disc is mounted on a pole or line, and lowered slowly down in the water. The depth at which the disk is no longer visible is taken as a measure of the transparency of the water. This measure is known as the Secchi depth and is related to water turbidity. Since its invention, the disk has also been used in a modified, smaller 20 cm (8 in) diameter, black and white design to measure freshwater transparency.
 W
WSediment traps are instruments used in oceanography and limnology to measure the quantity of sinking particulate organic material in aquatic systems, usually oceans, lakes, or reservoirs. This flux of material is the product of biological and ecological processes typically within the surface euphotic zone, and is of interest to scientists studying the role of the biological pump in the carbon cycle.
 W
WAn underwater glider is a type of autonomous underwater vehicle (AUV) that employs variable-buoyancy propulsion instead of traditional propellers or thrusters. It employs variable buoyancy in a similar way to a profiling float, but unlike a float, which can move only up and down, an underwater glider is fitted with hydrofoils that allow it to glide forward while descending through the water. At a certain depth, the glider switches to positive buoyancy to climb back up and forward, and the cycle is then repeated.
 W
WUnmanned surface vehicles are boats that operate on the surface of the water without a crew.
 W
WThe Van Veen grab sampler is an instrument to sample sediment in water environments. Usually it is a clamshell bucket made of stainless steel. Up to 20 cm deep samples of roughly 0.1 m2 can be extracted with this instrument. It can be light-weight and low-tech. The smallest version even fits into hand luggage. The sampler was invented by Johan van Veen in 1933.
 W
WWeather buoys are instruments which collect weather and ocean data within the world's oceans, as well as aid during emergency response to chemical spills, legal proceedings, and engineering design. Moored buoys have been in use since 1951, while drifting buoys have been used since 1979. Moored buoys are connected with the ocean bottom using either chains, nylon, or buoyant polypropylene. With the decline of the weather ship, they have taken a more primary role in measuring conditions over the open seas since the 1970s. During the 1980s and 1990s, a network of buoys in the central and eastern tropical Pacific Ocean helped study the El Niño-Southern Oscillation. Moored weather buoys range from 1.5–12 metres (5–40 ft) in diameter, while drifting buoys are smaller, with diameters of 30–40 centimetres (12–16 in). Drifting buoys are the dominant form of weather buoy in sheer number, with 1250 located worldwide. Wind data from buoys has smaller error than that from ships. There are differences in the values of sea surface temperature measurements between the two platforms as well, relating to the depth of the measurement and whether or not the water is heated by the ship which measures the quantity.
 W
WThe Young grab, or the Young modified Van Veen grab sampler is an instrument to sample sediment in the ocean. It is a modified version of the Van Veen grab sampler, with a clamshell bucket made out of stainless steel mounted to a supporting frame. The sampling area extracted with this instrument can vary depending on its size. With the modifications this version of the Van Veen grab sampler is heavier than the traditional version. The frame allows for better stability and level sampling. Weights can be attached to the frame to ensure the bucket grabs sufficient sediment, or skids to ensure the gear does not sink too deep in soft sediments.