 W
WIn mathematics and computer science, connectivity is one of the basic concepts of graph theory: it asks for the minimum number of elements that need to be removed to separate the remaining nodes into isolated subgraphs. It is closely related to the theory of network flow problems. The connectivity of a graph is an important measure of its resilience as a network.
 W
WThe algebraic connectivity of a graph G is the second-smallest eigenvalue of the Laplacian matrix of G. This eigenvalue is greater than 0 if and only if G is a connected graph. This is a corollary to the fact that the number of times 0 appears as an eigenvalue in the Laplacian is the number of connected components in the graph. The magnitude of this value reflects how well connected the overall graph is. It has been used in analysing the robustness and synchronizability of networks.
 W
WIn polyhedral combinatorics, a branch of mathematics, Balinski's theorem is a statement about the graph-theoretic structure of three-dimensional polyhedra and higher-dimensional polytopes. It states that, if one forms an undirected graph from the vertices and edges of a convex d-dimensional polyhedron or polytope, then the resulting graph is at least d-vertex-connected: the removal of any d − 1 vertices leaves a connected subgraph. For instance, for a three-dimensional polyhedron, even if two of its vertices are removed, for any pair of vertices there will still exist a path of vertices and edges connecting the pair.
 W
WIn graph theory, a biconnected component is a maximal biconnected subgraph. Any connected graph decomposes into a tree of biconnected components called the block-cut tree of the graph. The blocks are attached to each other at shared vertices called cut vertices or articulation points. Specifically, a cut vertex is any vertex whose removal increases the number of connected components.
 W
WIn graph theory, a bridge, isthmus, cut-edge, or cut arc is an edge of a graph whose deletion increases the graph's number of connected components. Equivalently, an edge is a bridge if and only if it is not contained in any cycle. For a connected graph, a bridge can uniquely determine a cut. A graph is said to be bridgeless or isthmus-free if it contains no bridges.
 W
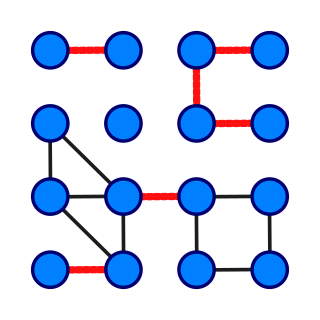
WIn graph theory, a component of an undirected graph is an induced subgraph in which any two vertices are connected to each other by paths, and which is connected to no additional vertices in the rest of the graph. For example, the graph shown in the illustration has three components. A vertex with no incident edges is itself a component. A graph that is itself connected has exactly one component, consisting of the whole graph. Components are also sometimes called connected components.
 W
WIn graph theory, toughness is a measure of the connectivity of a graph. A graph G is said to be t-tough for a given real number t if, for every integer k > 1, G cannot be split into k different connected components by the removal of fewer than tk vertices. For instance, a graph is 1-tough if the number of components formed by removing a set of vertices is always at most as large as the number of removed vertices. The toughness of a graph is the maximum t for which it is t-tough; this is a finite number for all finite graphs except the complete graphs, which by convention have infinite toughness.
 W
WIn graph theory, for a k-connected graph G =, a subset of edges is considered a certificate for the k-connectivity of the graph G if and only if the subgraph G' = is k-connected.
 W
WIn graph theory, a connected graph G is said to be k-vertex-connected if it has more than k vertices and remains connected whenever fewer than k vertices are removed.
 W
WIn computer science and graph theory, Karger's algorithm is a randomized algorithm to compute a minimum cut of a connected graph. It was invented by David Karger and first published in 1993.
 W
WIn graph theory, a path in a graph is a finite or infinite sequence of edges which joins a sequence of vertices which, by most definitions, are all distinct. A directed path in a directed graph is a finite or infinite sequence of edges which joins a sequence of distinct vertices, but with the added restriction that the edges be all directed in the same direction.
 W
WIn graph theory, a branch of mathematics, the triconnected components of a biconnected graph are a system of smaller graphs that describe all of the 2-vertex cuts in the graph. An SPQR tree is a tree data structure used in computer science, and more specifically graph algorithms, to represent the triconnected components of a graph. The SPQR tree of a graph may be constructed in linear time and has several applications in dynamic graph algorithms and graph drawing.
 W
WIn graph theory, the Stoer–Wagner algorithm is a recursive algorithm to solve the minimum cut problem in undirected weighted graphs with non-negative weights. It was proposed by Mechthild Stoer and Frank Wagner in 1995. The essential idea of this algorithm is to shrink the graph by merging the most intensive vertices, until the graph only contains two combined vertex sets. At each phase, the algorithm finds the minimum - cut for two vertices and chosen at its will. Then the algorithm shrinks the edge between and to search for non - cuts. The minimum cut found in all phases will be the minimum weighted cut of the graph.
 W
WIn the branch of mathematics called graph theory, the strength of an undirected graph corresponds to the minimum ratio edges removed/components created in a decomposition of the graph in question. It is a method to compute partitions of the set of vertices and detect zones of high concentration of edges, and is analogous to graph toughness which is defined similarly for vertex removal.
 W
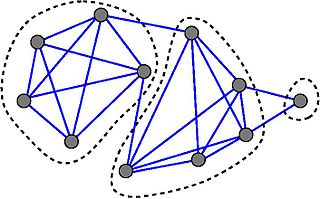
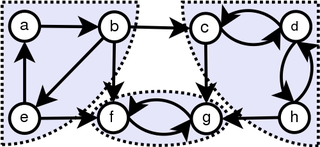
WIn the mathematical theory of directed graphs, a graph is said to be strongly connected if every vertex is reachable from every other vertex. The strongly connected components of an arbitrary directed graph form a partition into subgraphs that are themselves strongly connected. It is possible to test the strong connectivity of a graph, or to find its strongly connected components, in linear time.
 W
WTarjan's strongly connected components algorithm is an algorithm in graph theory for finding the strongly connected components (SCCs) of a directed graph. It runs in linear time, matching the time bound for alternative methods including Kosaraju's algorithm and the path-based strong component algorithm. The algorithm is named for its inventor, Robert Tarjan.