 W
WIn discrete geometry, an arrangement is the decomposition of the d-dimensional linear, affine, or projective space into connected cells of different dimensions, induced by a finite collection of geometric objects, which are usually of dimension one less than the dimension of the space, and often of the same type as each other, such as hyperplanes or spheres.
 W
WBarrier resilience is an algorithmic optimization problem in computational geometry motivated by the design of wireless sensor networks, in which one seeks a path through a collection of barriers that passes through as few barriers as possible.
 W
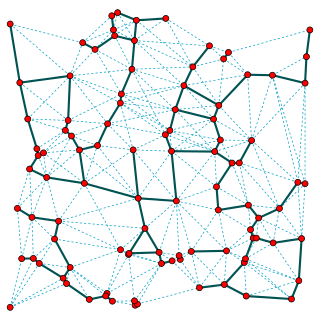
WIn computational geometry and geometric graph theory, a β-skeleton or beta skeleton is an undirected graph defined from a set of points in the Euclidean plane. Two points p and q are connected by an edge whenever all the angles prq are sharper than a threshold determined from the numerical parameter β.
 W
WIn geometry, the convex hull or convex envelope or convex closure of a shape is the smallest convex set that contains it. The convex hull may be defined either as the intersection of all convex sets containing a given subset of a Euclidean space, or equivalently as the set of all convex combinations of points in the subset. For a bounded subset of the plane, the convex hull may be visualized as the shape enclosed by a rubber band stretched around the subset.
 W
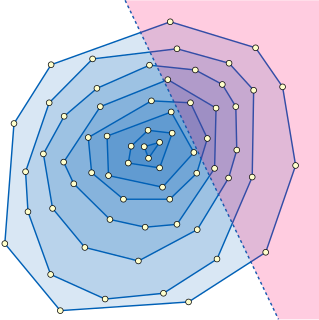
WIn computational geometry, the convex layers of a set of points in the Euclidean plane are a sequence of nested convex polygons having the points as their vertices. The outermost one is the convex hull of the points and the rest are formed in the same way recursively. The innermost layer may be degenerate, consisting only of one or two points. The problem of constructing convex layers has also been called onion peeling or onion decomposition.
 W
WDiscrete & Computational Geometry is a peer-reviewed mathematics journal published quarterly by Springer. Founded in 1986 by Jacob E. Goodman and Richard M. Pollack, the journal publishes articles on discrete geometry and computational geometry.
 W
WThe Euclidean shortest path problem is a problem in computational geometry: given a set of polyhedral obstacles in a Euclidean space, and two points, find the shortest path between the points that does not intersect any of the obstacles.
 W
WIn computational geometry, the farthest-first traversal of a bounded metric space is a sequence of points in the space, where the first point is selected arbitrarily and each successive point is as far as possible from the set of previously-selected points. The same concept can also be applied to a finite set of geometric points, by restricting the selected points to belong to the set or equivalently by considering the finite metric space generated by these points. For a finite metric space or finite set of geometric points, the resulting sequence forms a permutation of the points, known as the greedy permutation.
 W
WFortune's algorithm is a sweep line algorithm for generating a Voronoi diagram from a set of points in a plane using O(n log n) time and O(n) space. It was originally published by Steven Fortune in 1986 in his paper "A sweepline algorithm for Voronoi diagrams."
 W
WGeometry processing, or mesh processing, is an area of research that uses concepts from applied mathematics, computer science and engineering to design efficient algorithms for the acquisition, reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. As the name implies, many of the concepts, data structures, and algorithms are directly analogous to signal processing and image processing. For example, where image smoothing might convolve an intensity signal with a blur kernel formed using the Laplace operator, geometric smoothing might be achieved by convolving a surface geometry with a blur kernel formed using the Laplace-Beltrami operator.
 W
WIn computational geometry, Klee's measure problem is the problem of determining how efficiently the measure of a union of (multidimensional) rectangular ranges can be computed. Here, a d-dimensional rectangular range is defined to be a Cartesian product of d intervals of real numbers, which is a subset of Rd.
 W
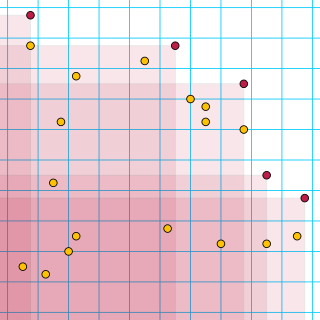
WIn computational geometry, a point p in a finite set of points S is said to be maximal or non-dominated if there is no other point q in S whose coordinates are all greater than or equal to the corresponding coordinates of p. The maxima of a point set S are all the maximal points of S. The problem of finding all maximal points, sometimes called the problem of the maxima or maxima set problem, has been studied as a variant of the convex hull and orthogonal convex hull problems. It is equivalent to finding the Pareto frontier of a collection of points, and was called the floating-currency problem by Herbert Freeman based on an application involving comparing the relative wealth of individuals with different holdings of multiple currencies.
 W
WIn computational geometry, the opaque forest problem can be stated as follows: "Given a convex polygon C in the plane, determine the minimal forest T of closed, bounded line segments such that every line through C also intersects T". T is said to be the opaque forest, or barrier of C. C is said to be the coverage of T. While any forest that covers C is a barrier of C, we wish to find the one with shortest length.
 W
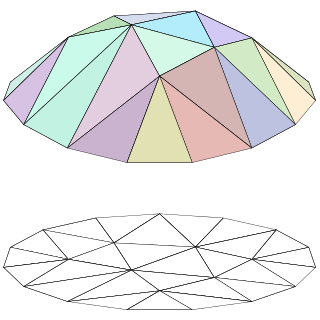
WIn computational geometry, a polyhedral terrain in three-dimensional Euclidean space is a polyhedral surface that intersects every line parallel to some particular line in a connected set or the empty set. Without loss of generality, we may assume that the line in question is the z-axis of the Cartesian coordinate system. Then a polyhedral terrain is the image of a piecewise-linear function in x and y variables.
 W
WPolymake is software for the algorithmic treatment of convex polyhedra.
 W
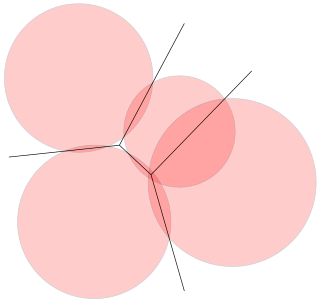
WIn computational geometry, a power diagram, also called a Laguerre–Voronoi diagram, Dirichlet cell complex, radical Voronoi tesselation or a sectional Dirichlet tesselation, is a partition of the Euclidean plane into polygonal cells defined from a set of circles. The cell for a given circle C consists of all the points for which the power distance to C is smaller than the power distance to the other circles. The power diagram is a form of generalized Voronoi diagram, and coincides with the Voronoi diagram of the circle centers in the case that all the circles have equal radii.
 W
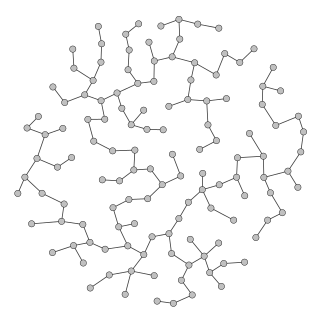
WIn graph theory, the rectilinear minimum spanning tree (RMST) of a set of n points in the plane is a minimum spanning tree of that set, where the weight of the edge between each pair of points is the rectilinear distance between those two points.
 W
WIn robust statistics and computational geometry, simplicial depth is a measure of central tendency determined by the simplices that contain a given point. For the Euclidean plane, it counts the number of triangles of sample points that contain a given point.
 W
WIn computational geometry and robotics, simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. While this initially appears to be a chicken-and-egg problem there are several algorithms known for solving it, at least approximately, in tractable time for certain environments. Popular approximate solution methods include the particle filter, extended Kalman filter, Covariance intersection, and GraphSLAM. SLAM algorithms are used in navigation, robotic mapping and odometry for virtual reality or augmented reality.
 W
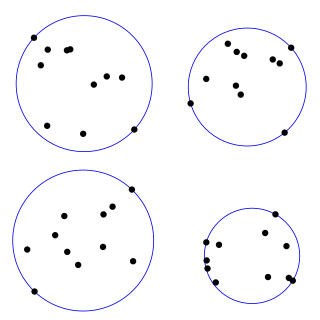
WThe smallest-circle problem is a mathematical problem of computing the smallest circle that contains all of a given set of points in the Euclidean plane. The corresponding problem in n-dimensional space, the smallest bounding sphere problem, is to compute the smallest n-sphere that contains all of a given set of points. The smallest-circle problem was initially proposed by the English mathematician James Joseph Sylvester in 1857.
 W
WIn computational geometry, a Steiner point is a point that is not part of the input to a geometric optimization problem but is added during the solution of the problem, to create a better solution than would be possible from the original points alone.
 W
WIn geometry, a straight skeleton is a method of representing a polygon by a topological skeleton. It is similar in some ways to the medial axis but differs in that the skeleton is composed of straight line segments, while the medial axis of a polygon may involve parabolic curves. However, both are homotopy-equivalent to the underlying polygon.
 W
WIn non-parametric statistics, the Theil–Sen estimator is a method for robustly fitting a line to sample points in the plane by choosing the median of the slopes of all lines through pairs of points. It has also been called Sen's slope estimator, slope selection, the single median method, the Kendall robust line-fit method, and the Kendall–Theil robust line. It is named after Henri Theil and Pranab K. Sen, who published papers on this method in 1950 and 1968 respectively, and after Maurice Kendall because of its relation to the Kendall tau rank correlation coefficient.
 W
WIn computational geometry, the Urquhart graph of a set of points in the plane, named after Roderick B. Urquhart, is obtained by removing the longest edge from each triangle in the Delaunay triangulation.
 W
WIn mathematics, a Voronoi diagram is a partition of a plane into regions close to each of a given set of objects. In the simplest case, these objects are just finitely many points in the plane. For each seed there is a corresponding region consisting of all points of the plane closer to that seed than to any other. These regions are called Voronoi cells. The Voronoi diagram of a set of points is dual to its Delaunay triangulation.
 W
WIn computational geometry, the Yao graph, named after Andrew Yao, is a kind of geometric spanner, a weighted undirected graph connecting a set of geometric points with the property that, for every pair of points in the graph, their shortest path has a length that is within a constant factor of their Euclidean distance.