 W
WIn mathematics, a differential equation is an equation that relates one or more functions and their derivatives. In applications, the functions generally represent physical quantities, the derivatives represent their rates of change, and the differential equation defines a relationship between the two. Such relations are common; therefore, differential equations play a prominent role in many disciplines including engineering, physics, economics, and biology.
 W
WIn mathematics, the Bendixson–Dulac theorem on dynamical systems states that if there exists a function such that the expression
 W
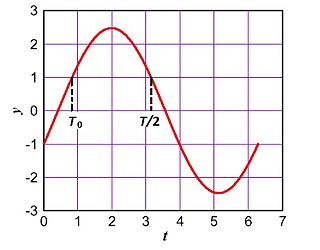
WThe Biryukov equation, named after Vadim Biryukov (1946), is a non-linear second-order differential equation used to model damped oscillators.
 W
WIn differential equations, a breather surface is a mathematical surface relating to breathers.
 W
WIn physics and geometry, a catenary is the curve that an idealized hanging chain or cable assumes under its own weight when supported only at its ends.
 W
WIn mathematics, delay differential equations (DDEs) are a type of differential equation in which the derivative of the unknown function at a certain time is given in terms of the values of the function at previous times. DDEs are also called time-delay systems, systems with aftereffect or dead-time, hereditary systems, equations with deviating argument, or differential-difference equations. They belong to the class of systems with the functional state, i.e. partial differential equations (PDEs) which are infinite dimensional, as opposed to ordinary differential equations (ODEs) having a finite dimensional state vector. Four points may give a possible explanation of the popularity of DDEs:Aftereffect is an applied problem: it is well known that, together with the increasing expectations of dynamic performances, engineers need their models to behave more like the real process. Many processes include aftereffect phenomena in their inner dynamics. In addition, actuators, sensors, and communication networks that are now involved in feedback control loops introduce such delays. Finally, besides actual delays, time lags are frequently used to simplify very high order models. Then, the interest for DDEs keeps on growing in all scientific areas and, especially, in control engineering. Delay systems are still resistant to many classical controllers: one could think that the simplest approach would consist in replacing them by some finite-dimensional approximations. Unfortunately, ignoring effects which are adequately represented by DDEs is not a general alternative: in the best situation, it leads to the same degree of complexity in the control design. In worst cases, it is potentially disastrous in terms of stability and oscillations. Voluntary introduction of delays can benefit the control system. In spite of their complexity, DDEs often appear as simple infinite-dimensional models in the very complex area of partial differential equations (PDEs).
WIn mathematics, a differential-algebraic system of equations (DAEs) is a system of equations that either contains differential equations and algebraic equations, or is equivalent to such a system. Such systems occur as the general form of differential equations for vector–valued functions x in one independent variable t,
 W
WThe differentiation of trigonometric functions is the mathematical process of finding the derivative of a trigonometric function, or its rate of change with respect to a variable. For example, the derivative of the sine function is written sin′(a) = cos(a), meaning that the rate of change of sin(x) at a particular angle x = a is given by the cosine of that angle.
WIn mathematics, the exponential response formula (ERF), also known as exponential response and complex replacement, is a method used to find a particular solution of a non-homogeneous linear ordinary differential equation of any order. The exponential response formula is applicable to non-homogeneous linear ordinary differential equations with constant coefficients if the function is polynomial, sinusoidal, exponential or the combination of the three. The general solution of a non-homogeneous linear ordinary differential equation is a superposition of the general solution of the associated homogeneous ODE and a particular solution to the non-homogeneous ODE. Alternative methods for solving ordinary differential equations of higher order are method of undetermined coefficients and method of variation of parameters.
 W
WThe forward problem of electrocardiology is a computational and mathematical approach to study the electrical activity of the heart through the body surface. The principal aim of this study is to computationally reproduce an electrocardiogram (ECG), which has important clinical relevance to define cardiac pathologies such as ischemia and infarction, or to test pharmaceutical intervention. Given their important functionalities and the relative small invasiveness, the electrocardiography techniques are used quite often as clinical diagnostic tests. Thus, it is natural to proceed to computationally reproduce an ECG, which means to mathematically model the cardiac behaviour inside the body.
 W
WGeometric analysis is a mathematical discipline where tools from differential equations, especially elliptic partial differential equations are used to establish new results in differential geometry and differential topology. The use of linear elliptic PDEs dates at least as far back as Hodge theory. More recently, it refers largely to the use of nonlinear partial differential equations to study geometric and topological properties of spaces, such as submanifolds of Euclidean space, Riemannian manifolds, and symplectic manifolds. This approach dates back to the work by Tibor Radó and Jesse Douglas on minimal surfaces, John Forbes Nash Jr. on isometric embeddings of Riemannian manifolds into Euclidean space, work by Louis Nirenberg on the Minkowski problem and the Weyl problem, and work by Aleksandr Danilovich Aleksandrov and Aleksei Pogorelov on convex hypersurfaces. In the 1980s fundamental contributions by Karen Uhlenbeck, Clifford Taubes, Shing-Tung Yau, Richard Schoen, and Richard Hamilton launched a particularly exciting and productive era of geometric analysis that continues to this day. A celebrated achievement was the solution to the Poincaré conjecture by Grigori Perelman, completing a program initiated and largely carried out by Richard Hamilton.
 W
WWhen a quantity grows towards a singularity under a finite variation it is said to undergo hyperbolic growth. More precisely, the reciprocal function has a hyperbola as a graph, and has a singularity at 0, meaning that the limit as is infinite: any similar graph is said to exhibit hyperbolic growth.
WIn mathematics, an integro-differential equation is an equation that involves both integrals and derivatives of a function.
 W
WIn mathematics, the Kuramoto–Sivashinsky equation is a fourth-order nonlinear partial differential equation, named after Yoshiki Kuramoto and Gregory Sivashinsky, who derived the equation to model the diffusive instabilities in a laminar flame front in the late 1970s. The equation reads as
 W
WIn mathematics, a leaky integrator equation is a specific differential equation, used to describe a component or system that takes the integral of an input, but gradually leaks a small amount of input over time. It appears commonly in hydraulics, electronics, and neuroscience where it can represent either a single neuron or a local population of neurons.
WIn mathematics, a linear differential equation is a differential equation that is defined by a linear polynomial in the unknown function and its derivatives, that is an equation of the form
WIn mathematics, differential equation is a fundamental concept that is used in many scientific areas. Many of the differential equations that are used have received specific names, which are listed in this article.
 W
WA logistic function or logistic curve is a common S-shaped curve with equation
 W
WZoghman Mebkhout is a French-Algerian mathematician. He is known for his work in algebraic analysis, geometry and representation theory, more precisely on the theory of D-modules.
 W
WThe path integral formulation is a description in quantum mechanics that generalizes the action principle of classical mechanics. It replaces the classical notion of a single, unique classical trajectory for a system with a sum, or functional integral, over an infinity of quantum-mechanically possible trajectories to compute a quantum amplitude.
 W
WIn geometry, a radiodrome is the pursuit curve followed by a point that is pursuing another linearly-moving point. The term is derived from the Greek words ῥᾴδιος, rhā́idios, 'easier' and δρόμος, drómos, 'running'. The classic form of a radiodrome is known as the "dog curve"; this is the path a dog follows when it swims across a stream with a current after something it has spotted on the other side. Because the dog drifts with the current, it will have to change its heading; it will also have to swim further than if it had taken the optimal heading. This case was described by Pierre Bouguer in 1732.
 W
WIn metallurgy, the Scheil-Gulliver equation describes solute redistribution during solidification of an alloy.
 W
WThe Schrödinger equation is a linear partial differential equation that governs the wave function of a quantum-mechanical system. It is a key result in quantum mechanics, and its discovery was a significant landmark in the development of the subject. The equation is named after Erwin Schrödinger, who postulated the equation in 1925, and published it in 1926, forming the basis for the work that resulted in his Nobel Prize in Physics in 1933.
 W
WThe Schwinger–Dyson equations (SDEs), or Dyson–Schwinger equations, named after Julian Schwinger and Freeman Dyson, are general relations between Green functions in quantum field theories (QFTs). They are also referred to as the Euler–Lagrange equations of quantum field theories, since they are the equations of motion corresponding to the Green's function.
 W
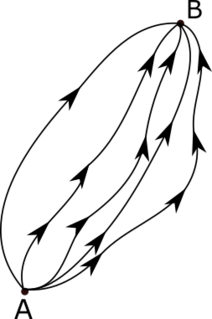
WSlope field is also called a direction field. The solutions of a first-order differential equation of a scalar function y(x) can be drawn in a 2-dimensional space with the x in horizontal and y in vertical direction. Possible solutions are functions y(x) drawn as solid curves. Sometimes it is too cumbersome solving the differential equation analytically. Then one can still draw the tangents of the function curves e.g. on a regular grid. The tangents are touching the functions at the grid points. However, the direction field is rather agnostic about chaotic aspects of the differential equation.
 W
WIn statistical physics, the Smoluchowski coagulation equation is a population balance equation introduced by Marian Smoluchowski in a seminal 1916 publication, describing the time evolution of the number density of particles as they coagulate to size x at time t.
WA stochastic differential equation (SDE) is a differential equation in which one or more of the terms is a stochastic process, resulting in a solution which is also a stochastic process. SDEs are used to model various phenomena such as unstable stock prices or physical systems subject to thermal fluctuations. Typically, SDEs contain a variable which represents random white noise calculated as the derivative of Brownian motion or the Wiener process. However, other types of random behaviour are possible, such as jump processes. Random differential equations are conjugate to stochastic differential equations.
 W
WIn physics, mathematics, and related fields, a wave is a propagating dynamic disturbance of one or more quantities, sometimes as described by a wave equation. In physical waves, at least two field quantities in the wave medium are involved. Waves can be periodic, in which case those quantities oscillate repeatedly about an equilibrium (resting) value at some frequency. When the entire waveform moves in one direction it is said to be a traveling wave; by contrast, a pair of superimposed periodic waves traveling in opposite directions makes a standing wave. In a standing wave, the amplitude of vibration has nulls at some positions where the wave amplitude appears smaller or even zero.