 W
WIn physics, a force is any interaction that, when unopposed, will change the motion of an object. A force can cause an object with mass to change its velocity, i.e., to accelerate. Force can also be described intuitively as a push or a pull. A force has both magnitude and direction, making it a vector quantity. It is measured in the SI unit of newtons and represented by the symbol F.
 W
WIn physics, the concept of absolute rotation—rotation independent of any external reference—is a topic of debate about relativity, cosmology, and the nature of physical laws.
 W
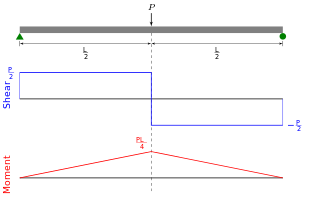
WIn solid mechanics, a bending moment is the reaction induced in a structural element when an external force or moment is applied to the element, causing the element to bend. The most common or simplest structural element subjected to bending moments is the beam. The diagram shows a beam which is simply supported at both ends; the ends can only react to the shear loads. Other beams can have both ends fixed; therefore each end support has both bending moments and shear reaction loads. Beams can also have one end fixed and one end simply supported. The simplest type of beam is the cantilever, which is fixed at one end and is free at the other end. In reality, beam supports are usually neither absolutely fixed nor absolutely rotating freely.
 W
WBuoyancy or upthrust, is an upward force exerted by a fluid that opposes the weight of a partially or fully immersed object. In a column of fluid, pressure increases with depth as a result of the weight of the overlying fluid. Thus the pressure at the bottom of a column of fluid is greater than at the top of the column. Similarly, the pressure at the bottom of an object submerged in a fluid is greater than at the top of the object. The pressure difference results in a net upward force on the object. The magnitude of the force is proportional to the pressure difference, and is equivalent to the weight of the fluid that would otherwise occupy the submerged volume of the object, i.e. the displaced fluid.
 W
WIn quantum field theory, the Casimir effect is a physical force acting on the macroscopic boundaries of a confined space which arises from the quantum fluctuations of the field. It is named after the Dutch physicist Hendrik Casimir, who predicted the effect for electromagnetic systems in 1948.
 W
WIn Newtonian mechanics, the centrifugal force is an inertial force that appears to act on all objects when viewed in a rotating frame of reference. It is directed away from an axis which is parallel to the axis of rotation and passing through the coordinate system's origin. If the axis of rotation passes through the coordinate system's origin, the centrifugal force is directed radially outwards from that axis. The magnitude of centrifugal force F on an object of mass m at the distance r from the origin of a frame of reference rotating with angular velocity ω is:
 W
WThe circle of forces, traction circle, friction circle, or friction ellipse is a useful way to think about the dynamic interaction between a vehicle's tire and the road surface. The diagram below shows the tire from above, so that the road surface lies in the x-y plane. The vehicle to which the tire is attached is moving in the positive y direction.
 W
WA contact force is any force that requires contact to occur. Contact forces are ubiquitous and are responsible for most visible interactions between macroscopic collections of matter. Pushing a car up a hill or kicking a ball across a room are some of the everyday examples where contact forces are at work. In the first case the force is continuously applied by the person on the car, while in the second case the force is delivered in a short impulse. Contact forces are often decomposed into orthogonal components, one perpendicular to the surface(s) in contact called the normal force, and one parallel to the surface(s) in contact, called the friction force.
WIn physics, the Coriolis force is an inertial or fictitious force that acts on objects that are in motion within a frame of reference that rotates with respect to an inertial frame. In a reference frame with clockwise rotation, the force acts to the left of the motion of the object. In one with anticlockwise rotation, the force acts to the right. Deflection of an object due to the Coriolis force is called the Coriolis effect. Though recognized previously by others, the mathematical expression for the Coriolis force appeared in an 1835 paper by French scientist Gaspard-Gustave de Coriolis, in connection with the theory of water wheels. Early in the 20th century, the term Coriolis force began to be used in connection with meteorology.
 W
WCornering force or side force is the lateral force produced by a vehicle tire during cornering.
 W
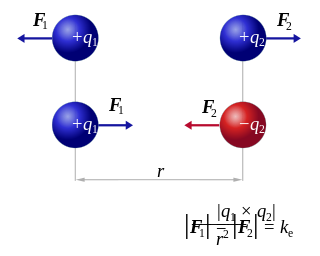
WCoulomb's law, or Coulomb's inverse-square law, is an experimental law of physics that quantifies the amount of force between two stationary, electrically charged particles. The electric force between charged bodies at rest is conventionally called electrostatic force or Coulomb force. The law was first discovered in 1785 by French physicist Charles-Augustin de Coulomb, hence the name. Coulomb's law was essential to the development of the theory of electromagnetism, maybe even its starting point, as it made it possible to discuss the quantity of electric charge in a meaningful way.
 W
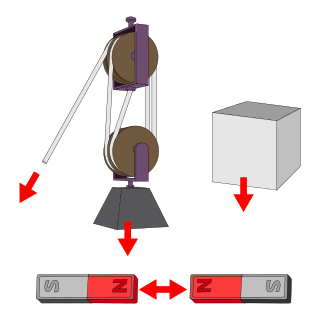
WA counterweight is a weight that, by applying an opposite force, provides balance and stability of a mechanical system. The purpose of a counterweight is to make lifting the load faster and more efficient, which saves energy and is less taxing on the lifting machine.
 W
WAn equilibrant force is a force which brings a body into mechanical equilibrium. According to Newton's second law, a body has zero acceleration when the vector sum of all the forces acting upon it is zero. Therefore, an equilibrant force is equal in magnitude and opposite in direction to the resultant of all the other forces acting on a body. The term has been attested since the late 19th century.
WA fictitious force is a force that appears to act on a mass whose motion is described using a non-inertial frame of reference, such as an accelerating or rotating reference frame. An example is seen in a passenger vehicle that is accelerating in the forward direction – passengers perceive that they are acted upon by a force in the rearward direction pushing them back into their seats. An example in a rotating reference frame is the force that appears to push objects outwards towards the rim of a centrifuge. These apparent forces are examples of fictitious forces.
 W
WIn physics a force field is a vector field that describes a non-contact force acting on a particle at various positions in space. Specifically, a force field is a vector field , where is the force that a particle would feel if it were at the point .
 W
WFriction is the force resisting the relative motion of solid surfaces, fluid layers, and material elements sliding against each other. There are several types of friction:Dry friction is a force that opposes the relative lateral motion of two solid surfaces in contact. Dry friction is subdivided into static friction ("stiction") between non-moving surfaces, and kinetic friction between moving surfaces. With the exception of atomic or molecular friction, dry friction generally arises from the interaction of surface features, known as asperities. Fluid friction describes the friction between layers of a viscous fluid that are moving relative to each other.Lubricated friction is a case of fluid friction where a lubricant fluid separates two solid surfaces.Skin friction is a component of drag, the force resisting the motion of a fluid across the surface of a body. Internal friction is the force resisting motion between the elements making up a solid material while it undergoes deformation.
 W
WA fluid flowing around the surface of an object exerts a force on it. Lift is the component of this force that is perpendicular to the oncoming flow direction. It contrasts with the drag force, which is the component of the force parallel to the flow direction. Lift conventionally acts in an upward direction in order to counter the force of gravity, but it can act in any direction at right angles to the flow.
 W
WIn physics, the line of action of a force F is a geometric representation of how the force is applied. It is the line through the point at which the force is applied in the same direction as the vector F→.
 W
WNormal contact stiffness is a physical quantity related to the generalized force displacement behavior of rough surfaces in contact with a rigid body or a second similar rough surface. Rough surfaces can be seen as consisting of large numbers asperities. As two solid bodies of the same material approach one another, asperities interact with one another and they transition from conditions of non-contact to homogeneous bulk type behaviour. The varying values of stiffness and true contact area that is exhibited at an interface during this transition is dependent on conditions of applied pressure and is of notable importance for the study of systems involving the physical interactions of multiple bodies including granular matter, electrode contacts, and thermal contacts, where the interface-localized structures govern overall system performance.
 W
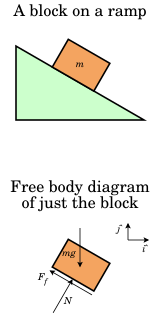
WIn mechanics, the normal force is the component of a contact force that is perpendicular to the surface that an object contacts, as in Figure 1. In this instance normal is used in the geometric sense and means perpendicular, as opposed to the common language use of normal meaning common or expected. A person standing still on a platform is acted upon by gravity, which would pull him down unless there were a countervailing force from the resistance of the platform's molecules, a force which is named the "normal force". The normal force is one type of ground reaction force. If the person stands on a slope and does not slide down it, the total ground reaction force can be divided into two components: a normal force perpendicular to the ground and a frictional force parallel to the ground. In another common situation, if an object hits a surface with some speed, and the surface can withstand it, the normal force provides for a rapid deceleration, which will depend on the flexibility of the surface and the object.
 W
WThe nuclear force is a force that acts between the protons and neutrons of atoms. Neutrons and protons, both nucleons, are affected by the nuclear force almost identically. Since protons have charge +1 e, they experience an electric force that tends to push them apart, but at short range the attractive nuclear force is strong enough to overcome the electromagnetic force. The nuclear force binds nucleons into atomic nuclei.
 W
WIn mechanical engineering, a parallel force system is a situation in which two forces of equal magnitude act in the same direction within the same plane, with the counter force in the middle. An example of this is a see saw. The children are applying the two forces at the ends, and the fulcrum in the middle gives the counter force to maintain the see saw in neutral position. Another example are the major vertical forces on an airplane in flight.
 W
WThe parallelogram of forces is a method for solving the results of applying two forces to an object.
 W
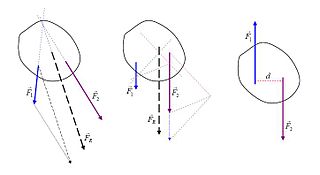
WIn physics and engineering, a resultant force is the single force and associated torque obtained by combining a system of forces and torques acting on a rigid body. The defining feature of a resultant force, or resultant force-torque, is that it has the same effect on the rigid body as the original system of forces. Calculating and visualizing the resultant force on a body is done through computational analysis, or a free body diagram.
 W
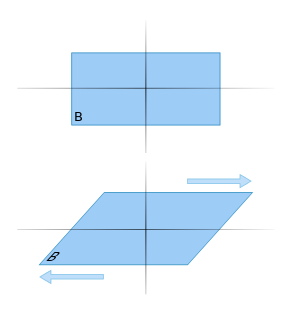
WIn solid mechanics, shearing forces are unaligned forces pushing one part of a body in one specific direction, and another part of the body in the opposite direction. When the forces are colinear, they are called compression forces. An example is a deck of cards being pushed one way on the top, and the other at the bottom, causing the cards to slide. Another example is when wind blows at the side of a peaked roof of a house - the side walls experience a force at their top pushing in the direction of the wind, and their bottom in the opposite direction, from the ground or foundation. William A. Nash defines shear force in terms of planes: "If a plane is passed through a body, a force acting along this plane is called a shear force or shearing force."
WSurface force denoted fs is the force that acts across an internal or external surface element in a material body. Surface force can be decomposed into two perpendicular components: normal forces and shear forces. A normal force acts normally over an area and a shear force acts tangentially over an area.
 W
WA three-body force is a force that does not exist in a system of two objects but appears in a three-body system. In general, if the behaviour of a system of more than two objects cannot be described by the two-body interactions between all possible pairs, as a first approximation, the deviation is mainly due to a three-body force.
 W
WThrust is a reaction force described quantitatively by Newton's third law. When a system expels or accelerates mass in one direction, the accelerated mass will cause a force of equal magnitude but opposite direction on that system. The force applied on a surface in a direction perpendicular or normal to the surface is also called thrust. Force, and thus thrust, is measured using the International System of Units (SI) in newtons, and represents the amount needed to accelerate 1 kilogram of mass at the rate of 1 meter per second per second. In mechanical engineering, force orthogonal to the main load is referred to as thrust.
 W
WIn physics and mechanics, torque is the rotational equivalent of linear force. It is also referred to as the moment, moment of force, rotational force or turning effect, depending on the field of study. The concept originated with the studies by Archimedes of the usage of levers. Just as a linear force is a push or a pull, a torque can be thought of as a twist to an object around a specific axis. Another definition of torque is the product of the magnitude of the force and the perpendicular distance of the line of action of a force from the axis of rotation. The symbol for torque is typically , the lowercase Greek letter tau. When being referred to as moment of force, it is commonly denoted by M.
 W
WIn physics, work is the energy transferred to or from an object via the application of force along a displacement. In its simplest form, it is often represented as the product of force and displacement. A force is said to do positive work if it has a component in the direction of the displacement of the point of application. A force does negative work if it has a component opposite to the direction of the displacement at the point of application of the force.