 W
WA block and tackle or only tackle is a system of two or more pulleys with a rope or cable threaded between them, usually used to lift heavy loads.
 W
WThe physics of a bouncing ball concerns the physical behaviour of bouncing balls, particularly its motion before, during, and after impact against the surface of another body. Several aspects of a bouncing ball's behaviour serve as an introduction to mechanics in high school or undergraduate level physics courses. However, the exact modelling of the behaviour is complex and of interest in sports engineering.
 W
WCentrode, in kinematics, is the path traced by the instantaneous center of rotation of a rigid plane figure moving in a plane. There are two types of centrodes: a space or fixed centrode, and a body or moving centrode.
 W
WIn kinematics, Chasles' theorem, or Mozzi–Chasles' theorem, says that the most general rigid body displacement can be produced by a translation along a line followed by a rotation about an axis colinear to that line.
 W
WA cylindrical joint is a two-degrees-of-freedom kinematic pair used in mechanisms. Cylindrical joints provide single-axis sliding function as well as a single axis rotation, providing a way for two rigid bodies to translate and rotate freely. This can be pictured by an unsecured axle mounted on a chassis, as it may freely rotate and translate. An example of this would be the rotating rods of a Table football.
 W
WIn mathematics, the dual quaternions are an 8-dimensional real algebra isomorphic to the tensor product of the quaternions and the dual numbers. Thus, they may be constructed in the same way as the quaternions, except using dual numbers instead of real numbers as coefficients. A dual quaternion can be represented in the form A + εB, where A and B are ordinary quaternions and ε is the dual unit, which satisfies ε2 = 0 and commutes with every element of the algebra. Unlike quaternions, the dual quaternions do not form a division algebra.
 W
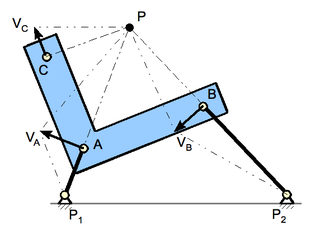
WThe instant center of rotation is the point fixed to a body undergoing planar movement that has zero velocity at a particular instant of time. At this instant, the velocity vectors of the other points in the body generate a circular field around this point which is identical to what is generated by a pure rotation.
 W
WIn mechanics, acceleration is the rate of change of the velocity of an object with respect to time. Accelerations are vector quantities. The orientation of an object's acceleration is given by the orientation of the net force acting on that object. The magnitude of an object's acceleration, as described by Newton's Second Law, is the combined effect of two causes:the net balance of all external forces acting onto that object — magnitude is directly proportional to this net resulting force; that object's mass, depending on the materials out of which it is made — magnitude is inversely proportional to the object's mass.
 W
WA mechanical joint is a section of a machine which is used to connect one or more mechanical part to another. Mechanical joints may be temporary or permanent, most types are designed to be disassembled. Most mechanical joints are designed to allow relative movement of these mechanical parts of the machine in one degree of freedom, and restrict movement in one or more others.
 W
W"The monkey and the hunter" is a physics demonstration often used to illustrate the effect of gravity on projectile motion. No live monkey is used in the demonstrations.
 W
WAn aircraft in flight is free to rotate in three dimensions: yaw, nose left or right about an axis running up and down; pitch, nose up or down about an axis running from wing to wing; and roll, rotation about an axis running from nose to tail. The axes are alternatively designated as vertical, transverse, and longitudinal respectively. These axes move with the vehicle and rotate relative to the Earth along with the craft. These definitions were analogously applied to spacecraft when the first manned spacecraft were designed in the late 1950s.
 W
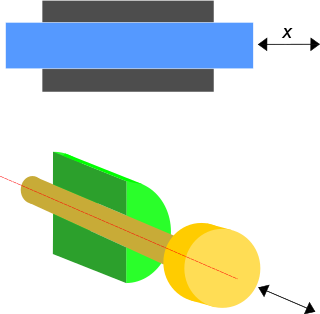
WA prismatic joint provides a linear sliding movement between two bodies, and is often called a slider, as in the slider-crank linkage. A prismatic pair is also called a sliding pair. A prismatic joint can be formed with a polygonal cross-section to resist rotation. See for example the dovetail joint and linear bearings.
 W
WA revolute joint is a one-degree-of-freedom kinematic pair used frequently in mechanisms and machines. The joint constrains the motion of two bodies to pure rotation along a common axis. The joint does not allow translation, or sliding linear motion, a constraint not shown in the diagram. Almost all assemblies of multiple moving bodies include revolute joints in their designs. Revolute joints are used in numerous applications such as door hinges, mechanisms, and other uni-axial rotation devices.
 W
WRotation is the circular movement of an object around an axis of rotation. A three-dimensional object may have an infinite number of rotation axes.
WA screw axis is a line that is simultaneously the axis of rotation and the line along which translation of a body occurs. Chasles' theorem shows that each Euclidean displacement in three-dimensional space has a screw axis, and the displacement can be decomposed into a rotation about and a slide along this screw axis.
 W
WScrew theory is the algebraic calculation of pairs of vectors, such as forces and moments or angular and linear velocity, that arise in the kinematics and dynamics of rigid bodies. The mathematical framework was developed by Sir Robert Stawell Ball in 1876 for application in kinematics and statics of mechanisms.
 W
WThe velocity of an object is the rate of change of its position with respect to a frame of reference, and is a function of time. Velocity is equivalent to a specification of an object's speed and direction of motion. Velocity is a fundamental concept in kinematics, the branch of classical mechanics that describes the motion of bodies.
 W
WIn relativistic physics, a velocity-addition formula is a three-dimensional equation that relates the velocities of objects in different reference frames. Such formulas apply to successive Lorentz transformations, so they also relate different frames. Accompanying velocity addition is a kinematic effect known as Thomas precession, whereby successive non-collinear Lorentz boosts become equivalent to the composition of a rotation of the coordinate system and a boost.